Старт разработки
Введение
Добро пожаловать в руководство по разработке мобильных приложений для операционной системы РОСА Мобайл! Этот документ создан для того, чтобы помочь вам освоить интегрированную среду разработки РОСА Мобайл и эффективно использовать её функционал для создания, тестирования и отладки мобильных приложений.
В данном руководстве вы найдете подробные инструкции по установке необходимого программного обеспечения, настройке рабочей среды, работе с устройствами, созданию шаблонов приложений, сборке проектов и использованию дополнительных инструментов, таких как удаленный отладчик и библиотека компонентов.
Разработка Первого приложенияМы постарались сделать это руководство максимально полным и удобным для пользователей с различным уровнем подготовки. Если у вас возникнут вопросы или предложения по улучшению документации, пожалуйста, обращайтесь в службу поддержки. Теперь давайте перейдем к основным разделам руководства.
Назначение системы
Общие сведения
Система представляет собой комплексный инструмент, который позволяет осуществлять создание, модернизацию и отладку мобильных приложений, функционирующих под управлением операционной системы РОСА Мобайл. Она предоставляет следующие функции:
- Подключение мобильных устройств и виртуальных мобильных устройств.
- Сборка приложений в различных вариациях.
- Создание шаблонов мобильных приложений и их запуск на мобильных/виртуальных устройствах.
- Использование удаленного отладчика и работа с дебаг-консолью.
- Использование специальной библиотеки компонентов «Rosa Controls».
Основные понятия
- Система – разрабатываемое программное обеспечение, описанное в данной документации.
- Пользователь – физическое лицо, сотрудник, который работает с системой.
- Устройство – мобильное устройство Р-ФОН.
- АРМ – Автоматизированное Рабочее Место. Понятие используется для обозначения рабочей станции или компьютера, на котором устанавливается и используется программное обеспечение.
- ППО — Прикладное программное обеспечение. В контексте данного документа речь идет о дополнительных программах и инструментах, которые необходимо установить на рабочую станцию (АРМ) для полноценной разработки приложений.
Область применения
Система предназначена для внутрикорпоративного использования специалистами РОСА, а также иными третьими лицами, получившими доступ к системе. В системе не предусмотрена ролевая модель, далее любой пользователь именуется «пользователем».
Начало работы с системой
Подготовка к работе
Для полнофункциональной работы потребуется дополнительное прикладное программное обеспечение и инструменты, установленные на используемое АРМ. Система может использоваться под управлением следующих аппаратных платформ:
- Microsoft Windows (10, 11)
- Linux (Ubuntu) 22.04
- MacOS x64 и MacOS ARM (не менее Sonoma 14.2.1)
Рекомендованные требования к АРМ
- CPU: Процессоры Intel 10+ поколения (4 ядра х 2,4GHz) или аналог.
- RAM: не менее 16GB.
- HDD/SSD: не менее 30GB свободного пространства.
Работа с устройствами
Добавление устройств, общий процесс
- ПК и добавляемое устройство должны быть подключены к одной сети.
- IP-адрес устройств уникален.
- Устройство включено и доступно при подключении через ssh-протокол.
Добавление устройств: DEVICES
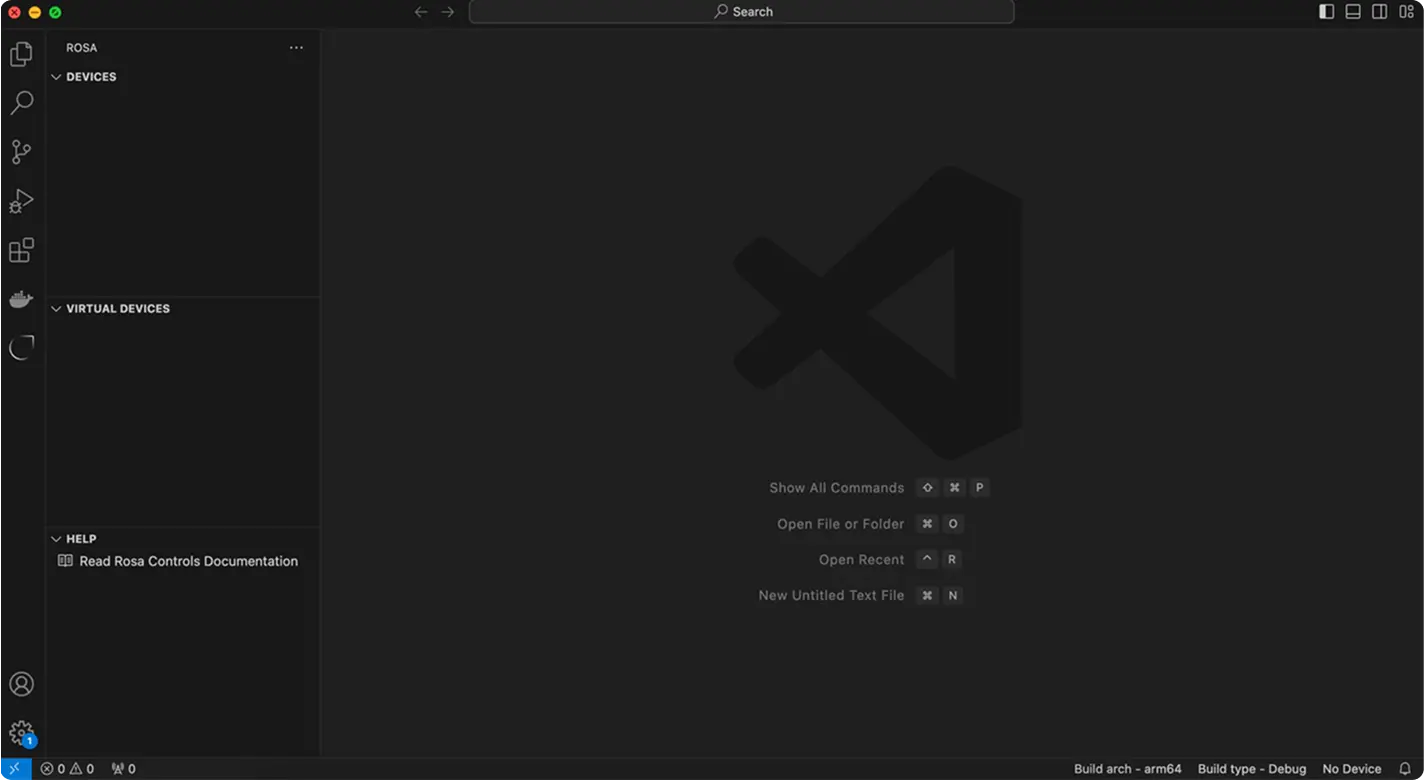
- Перейдите на главную страницу плагина.
- Выберите «DEVICES».
- Кликните по иконке «+».
- Введите IP-адрес, порт, имя устройства и пароль.
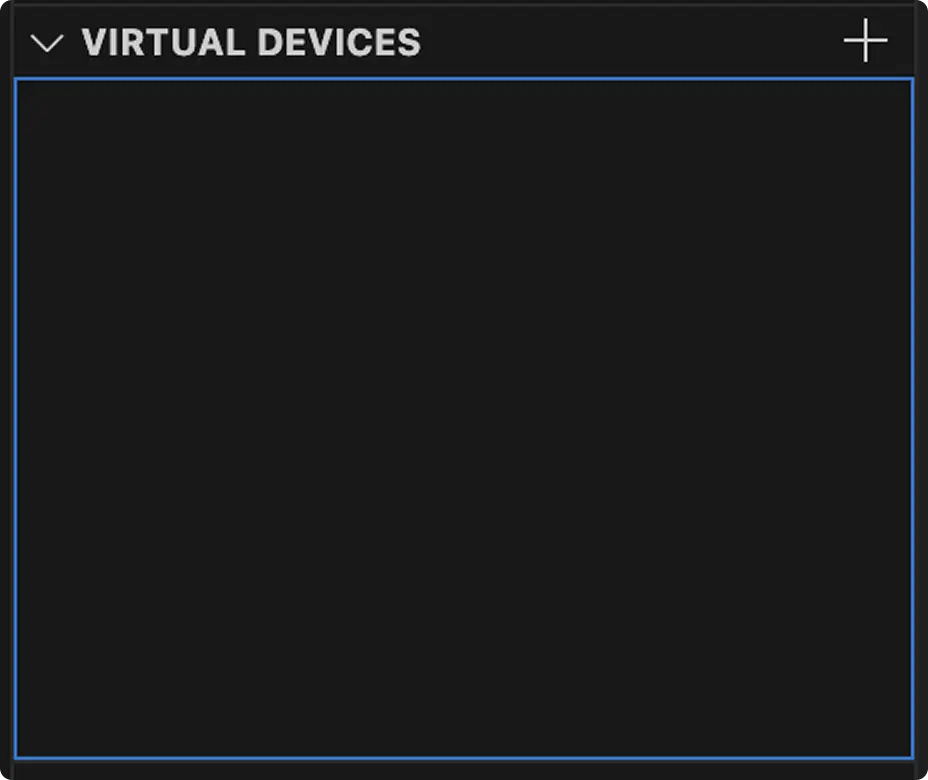
Добавление устройств: VIRTUAL DEVICES
Аналогично DEVICES, но для виртуальных устройств.
Удаление устройств
- Выберите строку наименования устройства.
- Кликните на UI-элемент «корзина».
Создание шаблона приложения
- Откройте любой файл в редакторе.
- На панели Editor выберите «Rosa: Create template».
- Выберите тип шаблона.
- Укажите папку для сохранения шаблона.
Сборка проектов
Начать сборку
- Выберите «Rosa: Start Build».
- Дождитесь завершения сборки.
Начать сборку и запустить на устройстве
- Выберите целевое устройство.
- Выберите «Rosa: Start Build and run on device».
Начать сборку RPM-пакета
- Выберите «Rosa: Start RPM Build».
- Найдите созданный RPM-файл в папке output.
Начать сборку RPM-пакета и установить на устройстве
- Выберите «Rosa: Start RPM Build and install on device».
- Приложение будет собрано, установлено и запущено на устройстве.
Возможные причины ошибок при сборке проектов
| Ошибка | Возможные причины |
|---|---|
| Build error |
|
| RPM build error |
|
| Project ___ finished with error on ___ |
|
| Install on device failed |
|
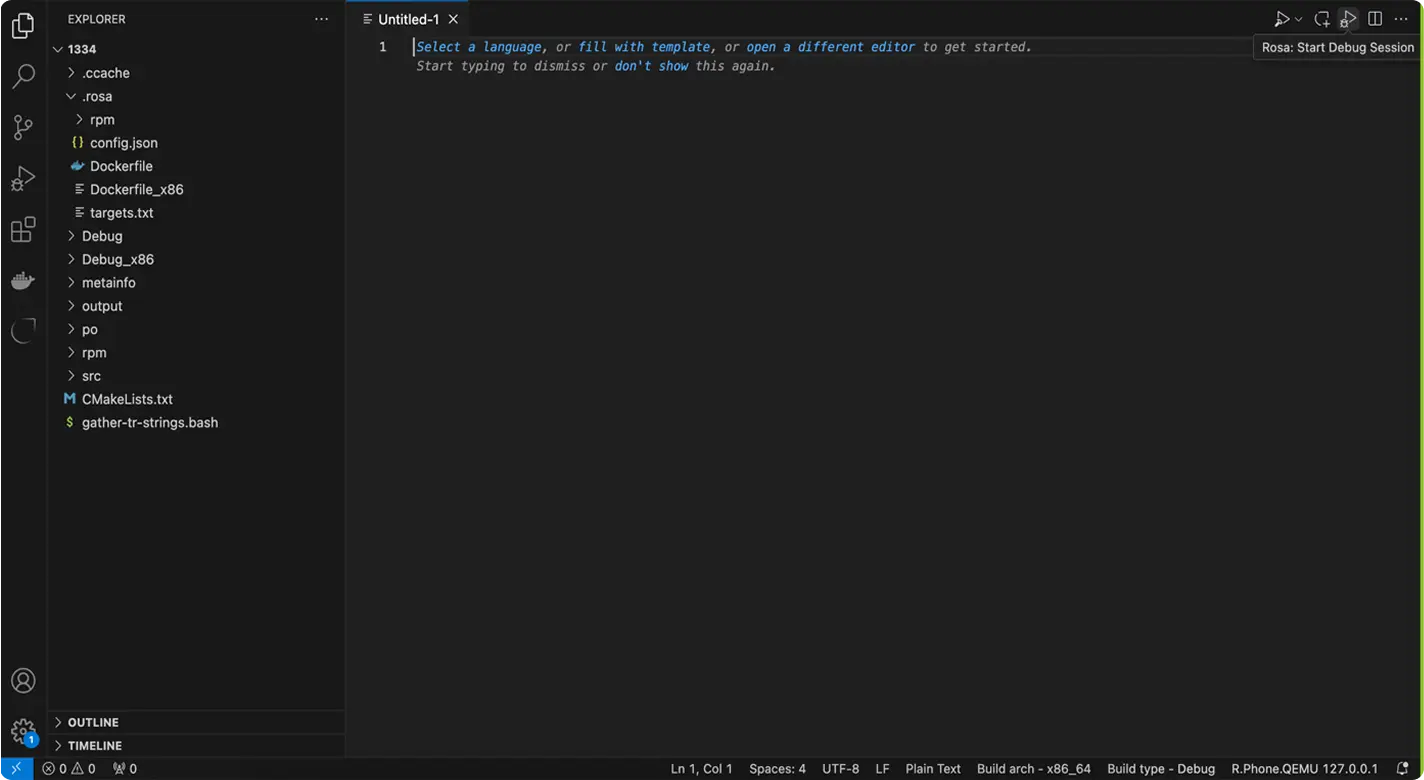
Удаленный отладчик
- Выберите «Rosa: Start Debug Session».
- Используйте системный бар управления отладкой и Debug Console.
Библиотека компонентов (Rosa Controls)
1. Импортируйте соответствующие модули QML.

2. Используйте функционал авто-дополнения кода.

3. Осуществляйте навигацию по исходному коду компонента.
Палитра команд плагина ROSA Mobile
Плагин поддерживает следующие консольные команды:
| Наименование | Описание | Доступность |
|---|---|---|
| Rosa: Add device | Переход к подключению реального МУ | Всегда |
| Rosa: Add virtual device | Переход к подключению виртуального МУ | Всегда |
| Rosa: Download basic image | Переход к загрузке docker-образов | Всегда |
| Rosa: Create template | Переход к созданию шаблона проекта | Всегда |
| Rosa: Create config | Переход к созданию конфигурации для сборки «стороннего» проекта | Всегда, но при отсутствии workspace не приведет к ошибке |
| Rosa: Focus on devices view | Перевод фокуса на просмотр списка реальных МУ | Всегда |
| Rosa: Focus on virtual devices view | Перевод фокуса на просмотр списка виртуальных МУ | Всегда |
| Rosa: Focus on help view | Перевод фокуса на раздел справок (Rosa Controls) | Всегда |
| Rosa: Select build type | Переход к выбору типа сроки проекта |
|
| Rosa: Select device | Переход к выбору устройства для работы |
|
| Rosa: Start build | Запуск простой сборки проекта (бинарные файлы) | Доступно, если проект создан пользователем с помощью плагина (не сторонний проект). |
| Rosa: Start build and run on device | Запуск простой сборки проекта (бинарные файлы) и запуск на устройстве |
|
| Rosa: Start rpm build | Запуск сборки RPM-пакета |
|
| Rosa: Start build and install on device | Запуск сборки RPM-пакета и установка RPM-пакета на устройство |
|
Реконфигурация системы
В случае возникновения ошибок выполните следующие действия:
Mac OS (x64 или ARM):
- Осуществить удаление всех подключенных устройств;
- Осуществить удаление плагина ROSA Mobile;
- Осуществить закрытие VS Code;
- Осуществить удаление Docker-images (hub.rosa.ru/…) из Docker;
- Осуществить закрытие Docker;
- Осуществить удаление папки «.ssh», путем ввода в терминал команды «sudo rm -rf ~/.ssh» и ввода пароля пользователя;
- Осуществить удаление папки «.docker», путем ввода в терминал команды «sudo rm -rf ~/.docker»;
- Осуществить перезагрузку ПК.
Linux (Ubuntu):
- Осуществить удаление всех подключенных устройств;
- Осуществить удаление плагина ROSA Mobile;
- Осуществить закрытие VS Code;
- Осуществить удаление Docker-images (hub.rosa.ru/…) из Docker;
- Осуществить закрытие Docker;
- Осуществить удаление папки «.ssh», путем ввода в терминал команды «sudo rm -rf ~/.ssh» и ввода пароля пользователя;
- Осуществить удаление папки «.docker», путем ввода в терминал команды «sudo rm -rf ~/.docker»;
- Осуществить перезагрузку ПК.
Windows:
- Осуществить удаление всех подключенных устройств;
- Осуществить удаление плагина ROSA Mobile;
- Осуществить закрытие VS Code;
- Осуществить удаление Docker-images (hub.rosa.ru/…) из Docker;
- Осуществить закрытие Docker;
- Осуществить удаление папки «.ssh», путем ее поиска через проводник. Стандартное расположение папки - домашняя директория текущего пользователя;
- Осуществить удаление папки «.docker», путем ее поиска через проводник. Стандартное расположение папки - домашняя директория текущего пользователя;
- Осуществить перезагрузку ПК.
По окончанию всех вышеперечисленных действий для повторной установки плагина необходимо:
- Запустить Docker;
- Осуществить установку плагина ROSA Mobile (vsix-файл);
- Дождаться окончания загрузки 2-ух Docker images (hub.rosa.ru/…) из Docker;
Только для MacOS ARM* - проверить конфигурационный файл Docker-а, путем выполнения команды в терминале cat ~/.docker/config.json.
Ожидаемый ответ:

В случае, если в поле "credsStore" указано иное значение необходимо заменить его на osxkeychain.
Заключение
Мы рассмотрели ключевые аспекты работы с интегрированной средой разработки ROSA Mobile, включая установку необходимых компонентов, настройку рабочей среды, работу с устройствами, создание шаблонов приложений, сборку проектов и использование инструментов отладки.
Основные моменты:
- Подготовка рабочей среды: Убедитесь, что все необходимые компоненты (Microsoft Visual Studio Code, Docker, VirtualBox, SSH-пакеты) установлены и настроены корректно.
- Работа с устройствами: Используйте функции подключения реальных и виртуальных устройств для тестирования ваших приложений.
- Создание и сборка проектов: Создавайте шаблоны приложений, собирайте их в различных форматах (бинарные файлы, RPM-пакеты) и устанавливайте на устройства.
- Отладка: Используйте встроенный отладчик для выявления и исправления ошибок в коде.
- Библиотека компонентов Rosa Controls: Эффективно используйте готовые компоненты для ускорения разработки.
Мы надеемся, что это руководство станет вашим надежным помощником в процессе разработки приложений для РОСА Мобайл. Удачи в создании новых проектов!